
Pinoo ile Labirent Oyunu
Projenin Amacı: Pinoo Kontrol Kartını kullanarak servo motor modülü ve joystick modülü ile labirent oyunu oluşturmak.
Süre: 2 ders
Yaş Grubu: 7 yaş ve üzeri
Pinoo Seti: Tam set,Maker set.
Kazanımları:
- Pinoo kontrol kartını kodlamayı öğrenir
- Joystick modülünü kodlamayı öğrenir.
- Servo Motor modülünü kodlamayı öğrenir.
- Algoritma kurma becerisi gelişir.
- Kodlama becerisi gelişir.
- Kendi oyununu tasarlar ve oynar.
Kullanılması Gereken Malzemeler: Mblock 3 programı, pinoo kontrol kartı, joystick modülü,2 adet servo motor modülü, bağlantı kablosu

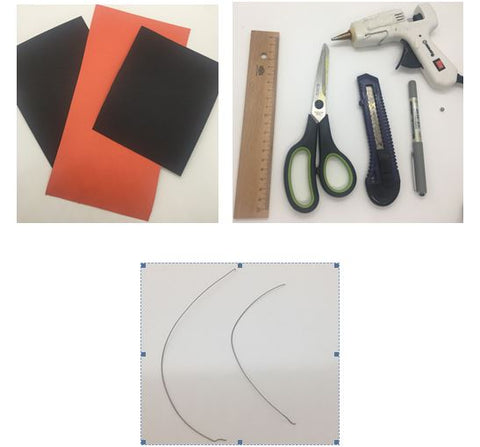
Tasarım için Gereken Malzemeler: Renkli mukavva, cetvel, kalem, falçata, makas, silikon tabancası ve silikon, bilye, alüminyum tel.
Proje Yapılışı:
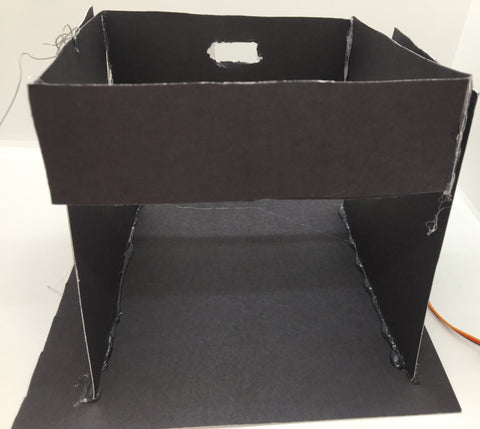
- Labirentin tabanı için makas yardımı ile mukavvadan 20 cm’lik bir kare kesiyoruz.

- Labirentin kenarları için 2 adet 14 cm’ye 16 cm’lik ikizkenar yamuk kesiyoruz.

- İkizkenar yamuklardan bir tanesinin orta kısmına, servo motorun sığabileceği kadar dikdörtgen bir delik açıyoruz.
NOT: Bu servo motor X ekseninde yani sağ ve sol yönlerinde hareket edecektir.

- Diğer parçaya, servo motor için kestiğimiz dikdörtgenin ortasına denk gelecek şekilde küçük bir delik açıyoruz.

- Labirentin iç kısmındaki destek için 4 adet 14 cm’ye 4 cm’lik dikdörtgenler kesiyoruz.

- Silikon tabancası yardımı ile dikdörtgenleri uç uca yapıştırarak kare oluşturuyoruz.

- Oluşturduğumuz karenin bir kenarının orta kısmına, falçata yardımı ile servo motorun sığabileceği kadar dikdörtgen delik açıyoruz.
NOT: Bu servo motor Y ekseninde yani yukarı ve aşağı yönlerinde hareket edecektir.

- Deliğin solundaki kenarın dış kısmının ortasına, servo motor pervanesini yatay olacak şekilde silikon tabancası yardımı ile monte ediyoruz.

- Dikdörtgen deliğin sağındaki kenarın orta kısmına küçük bir delik açıyoruz.

- İkizkenar yamuk parçaya açtığımız delik ile kareye açtığımız deliği alüminyum tel aracılığıyla çok sıkı olmayacak şekilde birbirine bağlıyoruz.

- Servo motor için ikizkenar parçaya açtığımız deliğe, motorumuzu silikon tabancası yardımıyla monte ediyoruz.

- Kareye yapıştırdığımız pervane ile servo motoru birleştiriyoruz.
NOT: Pervane ile motoru kodlama kısmında ayıracağız. Bu nedenle ikisini birbirine yapıştırmayınız!
- Birleştirdiğimiz kenarları silikon tabancası yardımıyla labirent tabanının üstüne monte ediyoruz.
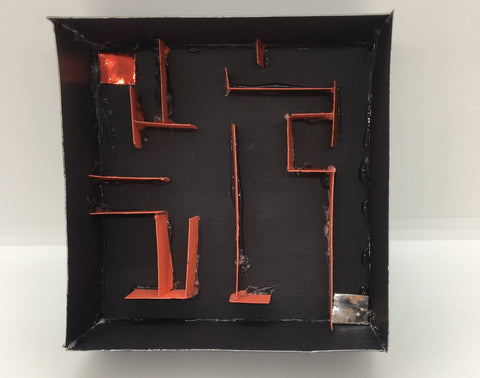
- Labirent için mukavvadan 12cm x 12cm’lik bir kare kesiyoruz.

- Labirentin duvarları için 4 adet, 12cm’ye 4cm’lik dikdörtgenler kesiyoruz. Daha sonra karenin kenarlarına silikon tabancası yardımıyla monte ediyoruz.

- Labirentimizi tasarlamak için farklı renkli mukavvadan 1.5cm eninde parçalar kesiyoruz.
NOT: Ne kadar keseceğiniz yapmak istediğiniz labirente göre değişecektir.
- Labirentimizi istediğimiz gibi tasarlıyoruz. Başlangıç ve bitiş noktalarını belli edecek şekilde o kısımlara mukavva yapıştırıyoruz.
- Y ekseni Servo motoru için açtığımız dikdörtgen deliğe motoru monte ediyoruz.

- Servo motorun karşısındaki kenarın orta kısmına küçük bir delik açıyoruz.

- Oluşturduğumuz labirentin bir kenarının orta kısmına, küçük bir delik açıyoruz.

- Açtığımız deliğin karşısındaki kenarın orta kısmına, servo motora denk gelecek şekilde pervaneyi silikon tabancası ile monte ediyoruz.

- Labirente açtığımız delik ile destek kısmına açtığımız deliği alüminyum tel yardımıyla çok sıkı olmayacak şekilde bağlıyoruz.

- Servo motor ile pervanesini birleştiriyoruz.
NOT: Pervane ile motoru kodlama kısmında ayıracağız. Bu nedenle ikisini birbirine yapıştırmayınız!

- Joystick modülünün altına koyabilmek için 11cm’ye 8cm’lik ikizkenar yamuk kesiyoruz.

- Oyunun ön tarafına silikon tabancası yardımı ile yapıştırıyoruz.
- Joystick modülünü ikizkenar yamuk parçamızın üstüne silikon tabancası yardımı ile monte ediyoruz.

- Servo motorların Kahverengi kablosu-GND, Kırmızı kablosu-5V, Turuncu kablosu-D0’a denk gelecek şekilde servo motor modülleri ile bağlantılarını yapıyoruz.

- Bağlantılarımızı yapıyoruz. Joystick modülünü 9 numaralı kırmızı/sarı girişe bağlantı kablosu ile bağlıyoruz. X eksenindeki Servo motoru bağlantı kablosu yardımıyla 3 numaralı mor girişe bağlıyoruz. Y eksenindeki Servo motoru ise bağlantı kablosu yardımıyla 2 numaralı mor girişe bağlıyoruz.
NOT: Servo motor ile pervaneleri ayıralım.
- Bağlantılarımızı tamamladık şimdi kodlama kısmına geçiyoruz. Bunun için mblock-3 uygulamasını kullanacağız.
- Pinoo Kontrol Kartımızı bağlantı kablosu yardımıyla bilgisayara bağlıyoruz ve Mblock3 uygulamasına giriş yapıyoruz. Daha sonra Pinoo Kontrol Kartımızı bilgisayar ile tanıştırıyoruz. Bunun için öncelikle Bağlan sekmesinden seri port seçeneğine tıklıyoruz. Daha sonra COM4’ü seçiyoruz.(Bilgisayara ve porta göre rakam farklılık gösterebilir.)

- Seri port bağlantısını yaptıktan sonra Kartlar sekmesinden kullanacağımız kartı seçiyoruz. Biz Arduino’nun Nano modeli ile çalışıyoruz.

- Pinoo uzantısını bilgisayarımıza ekleyebilmek için Uzantılar sekmesinden uzantıları yönet seçeneğine tıklıyoruz. Açılan pencerede arama motoruna “Pinoo” yazıyoruz ve çıkan sonuca indir dememiz yeterli. Bilgisayarımıza yüklendi.


- Tekrar Uzantılar sekmesine gelip Pinoo seçeneğine tıklıyoruz. Pinoo uzantısı ile kodlarımızı yazacağız.

Bağlan sekmesine tıklıyoruz. Açılan pencereden “Aygıt Yazılımı Güncellemesi” tıklıyoruz.

- Kodlama kısmında; uygulamanın başlaması için Olaylar menüsünden Yeşil Bayrağa tıklanınca kodunu alıyoruz.

- Joystick modülünde x ve y ekseni olmak üzere iki tane eksen bulunur. Bunların değerlerini görmek için değişken tanımlamamız gerekmektedir. Bu nedenle Veri&Blok menüsünde Bir değişken oluştur komutuna tıklıyoruz.

- Çıkan ekranda X ekseni ve Y ekseni diye ayrı ayrı değişkenler tanımlıyoruz.


- Kontrol menüsünden sürekli tekrarla komutunu alıyoruz. Daha sonra Veri&Blok kısmından x ekseni 0 olsun ve y ekseni 0 olsun kodlarını alıp sürekli tekrarla bloğunun içine atıyoruz.

- İşlemler menüsünden bölme işaretini alıyoruz ve 0 rakamının üstüne yerleştiriyoruz. Bunu yapma amacımız joystick modülünün değerini servo motorun değerine dönüştürmektir.

- Robotlar menüsünden joystcik kodunu alıyoruz ve x,y eksenlerini ayarlıyoruz.

- Ardından bölme işleminin sağ kısmına 5.683 yazıyoruz. Bunun nedeni; joystick modülü 0-1023 arasında değer alır, servo motor modülü ise 0-180 arasında değer alır. Joystick modülünün değeri en üstte olduğunda yani 1023 olduğunda servo motor modülü de en üst değerinde olmalıdır. Gelen değerleri eşitlemek için 1023/180 bölmemiz gerekir ve sonuç 5.683 olur.

- Şimdi yeşil bayrak’a tıklıyoruz ve joystick modülüne hiç dokunmuyoruz. Servo motor modülleri, joystick modülünün ortadayken olan konumuna göre hareket edecektir. Sonra kırmızı butona tıklıyoruz ve durduruyoruz. Daha sonra servo motor modüllerini ve pervanelerini tekrar birleştirelim.
- Robotlar sekmesinden servo motor kodlarını alıyoruz ve pin yazan kısımlarını değiştirmeyi unutmuyoruz. Daha sonra açılarını joystick modülünün eksenlerine göre ayarlıyoruz. 3. Kapıya x eksenini takmıştık bu nedenle veri&blok menüsünden x eksenine eşitliyoruz, 2. Kapıyı ise y eksenine eşitliyoruz. Şimdi Joystick modülünü nereye ne kadar çekersek servo motor modülümüzde ona göre hareket edecektir.

- Projemizin çalışmasında herhangi bir sorun yoksa projemizi bilgisayardan bağımsız olarak bir güç kaynağı ile de çalıştırmak için yazmış olduğumuz kodları kartımızın içine yüklememiz gerekiyor.
Bunun için başlangıçta kullandığımız yeşil bayrağa tıkla kodunu ve kuklaya sensör değerini söylettiğimiz kodu çöpe atarak Robotlar menüsünden Pinoo Programı kodunu alıyoruz.

- Koda sağ tıklayarak Arduino’ya yükle seçeneğine tıklıyoruz. (Kart olarak arduino ile çalışıyoruz.)

- Açılan pencerede tekrar Arduino'ya yükle butonuna tıklıyoruz.

- Kodlarımız karta yüklenirken bekliyoruz. Yükleme bitti dedikten sonra kapat butonuna tıklıyoruz.

- Herhangi bir problem yoksa güç kablomuzu bilgisayardan çıkartıyoruz. Pinoo Kontrol kartımıza 9v pil ve pil şapkası yardımıyla güç veriyoruz. Pil girişinin hemen yanında bulunan açma kapama tuşunu da on konumuna getiriyoruz.
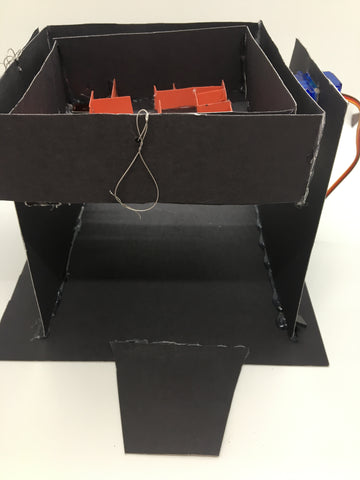
- Projenin Çalışma Hali:
Joystick modülünü hareket ettirmediğimizde labirent oyunu düz durmaktadır.

Joystick modülünü hareket ettirdiğimizde labirentte o yöne doğru hareket edecektir.
